1. 需要机器人有pcinterface和multitask选项
2. 创建虚拟信号

3. 将di_start和do_stop关联到系统输入
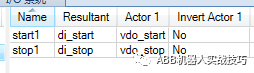
4. 创建crossconnection
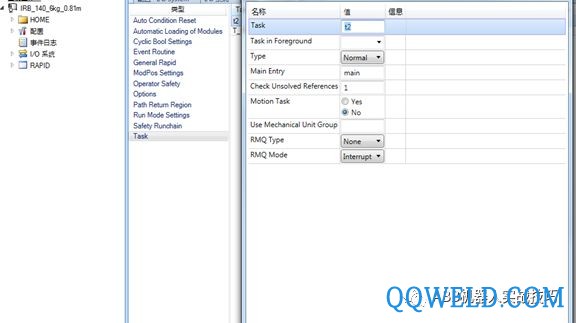
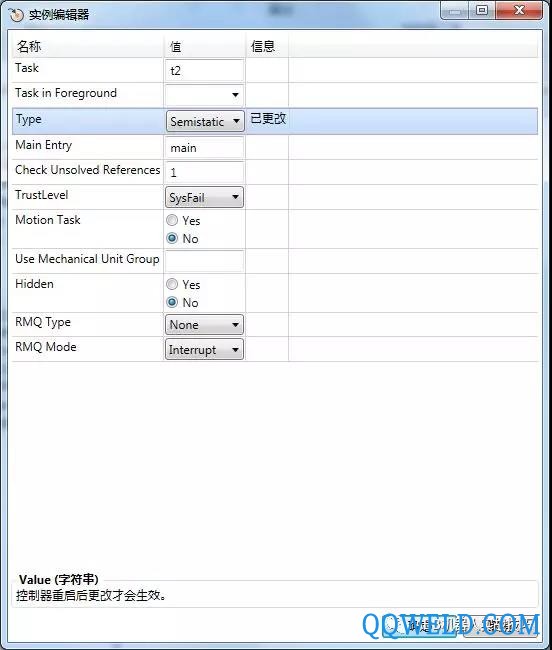
5. 新建任务t2,类型设为normal,以便能编程测试
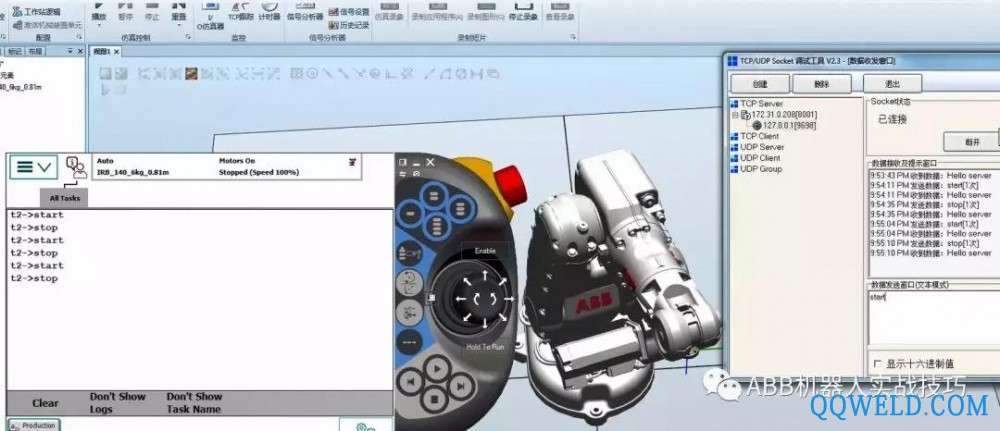
6. 在t2任务下新建模块,实质就是后台socket收发,当ABB机器人处于自动模式,收到start字符串,发送一个vdo_start脉冲信号,vdo_start关联到di_start信号,di_start信号关联到系统输入start上。Stop功能类似。
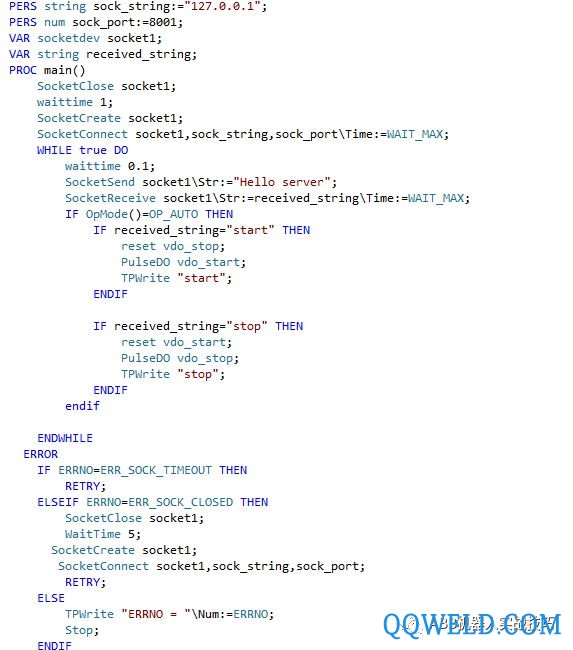
7. 测试完毕,将t2任务设为semistatic,即开机直接启动
8. 重启后,打开socket测试小软件,如果机器人处于自动模式且上电,小软件发送start,机器人启动,发送stop,机器人停止。