5.1.2 伺服单元的更换
更换顺序
1. DX100 抱闸关闭、断电 5 分钟后开始作业。再次期间绝对不要接触
端子部。
2. 请确认充电指示灯 (红色 LED)熄灭。
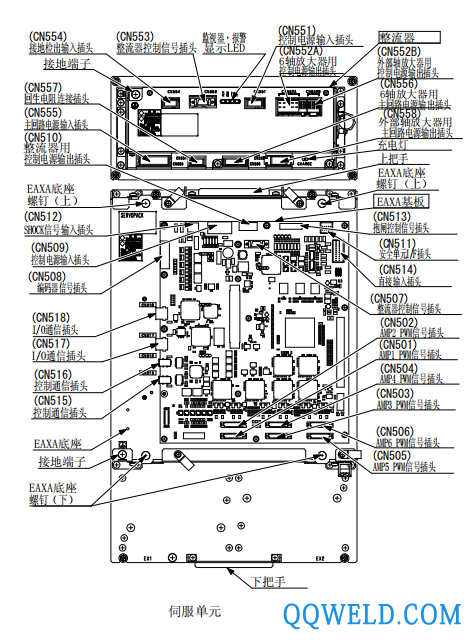
3. 从外部链接到伺服单元上的全部电缆按照以下顺序拆掉。
①整流器控制信号插座 (CN553)
② DC 控制电源插头 (CN551)
③控制电源输入插座 (CN551)
④抱闸控制信号插座 (CN513)
⑤控制电源输入插座 (CN509)
⑥ SHOCK 信号输入插座 (CN512)
⑦地线端子 (EAXA 底座)
⑧控制通信插座 (CN515)
⑨ I/O 通信插座 (CN517)
⑩编码器信号插座 (CN508)
4. 拆下来的电缆连接到伺服单元右侧。
5. 拆下固定 EAXA 底座的螺栓 (下)2 个。
6. 拆掉固定 EAXA 底座的螺栓 (上)2 个。
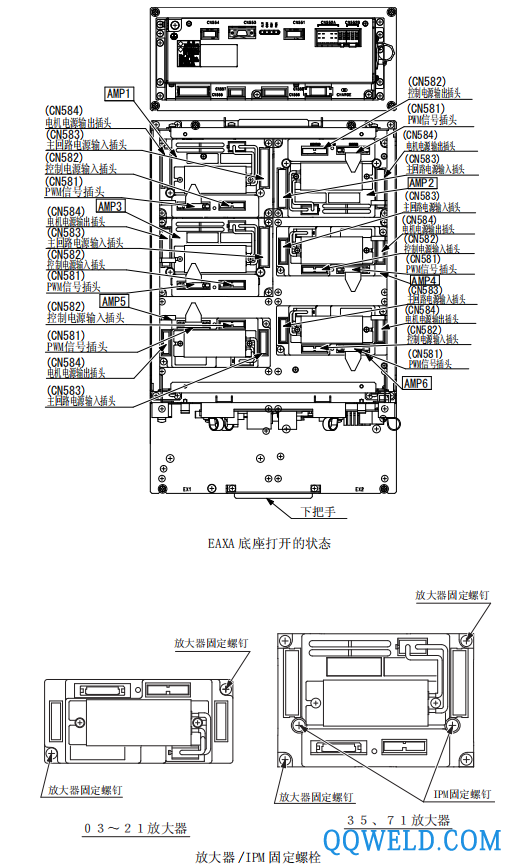
7. 打开 EAXA 底座。
8. 拆掉连接放大器的全部电缆。
9. 拆掉放大器的固定螺栓。
※ 03—21 放大器时,拆掉右上、左下共计 2 个地方的螺栓。
※ 35-71 放大器时,拆掉右上、左下共计 2 个地方的螺栓和 IPM 固
定螺栓 (2 个地方)。
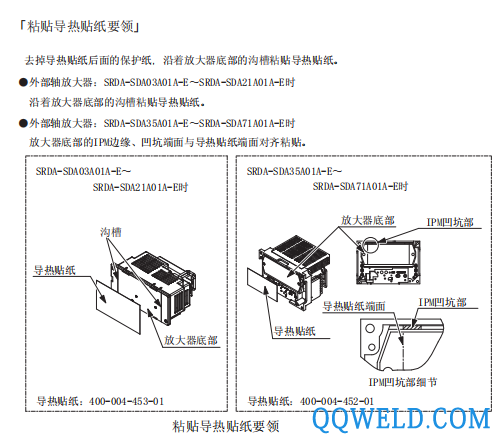
10. 把隔热板安装在新的伺服单元上。
( 请参考隔热板安装要领)
11. 安装新的放大器。
12. 把电缆连接到新的放大器上。
13. 拧紧 EAXA 底座固定螺栓 (上)2 个。
14. 拧紧 EAXA 底座固定螺栓 (下)2 个。
15. 连接上从伺服单元里拆卸下来的全部电缆。
连接顺序按照 3 的相反顺序安装就可以。