10.3 机器人 I/O 设置 及状态显示
机器人系统的电气 I/O(参见 8 电气接口)可以通过以下小结进行查看及设置。I/O
设置面板分为控制器 I/O 设置、用户 I/O 设置、工具端 I/O 设置。
10.3.1 控制器I/O
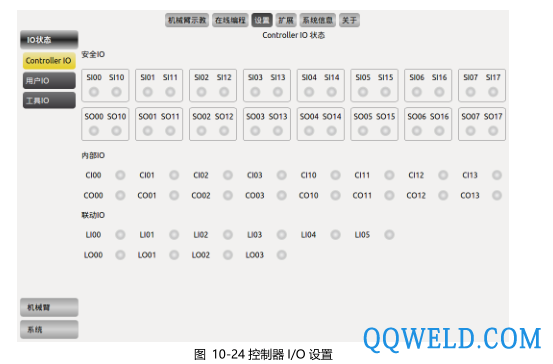
安全 I/O:所有的安全 I/O 都均为双通道,保持冗余配置可确保单一故障不会导致安全功能失效。(I/O 定义参见 8.5.3 安全 I/O 功能定义)内部 I/O:为内部功能接口,提供控制器内部接口板的 I/O 状态显示,不对用户开放。(I/O 定义参见 8.3)联动 I/O:机械臂可通过该 I/O 接口与外部一台或多台设备(机械臂等)通信,从而进行协同运动。(I/O 定义参见 7.4.2 联动模式)